精密サーボ DC モーター 46S/185-8A

サーボ DC モーターの基本機能: (他のモデル、性能はカスタマイズ可能)
| 1.定格電圧: | DC7.4V | 5.定格速度: | ≥ 2600 rpm |
| 2.動作電圧範囲: | DC7.4V-13V | 6.遮断電流: | ≤2.5A |
| 3.定格電力: | 25W | 7.負荷電流: | ≥1A |
| 4.回転方向: | CW出力軸が上 | 8.シャフトクリアランス: | ≤1.0mm |
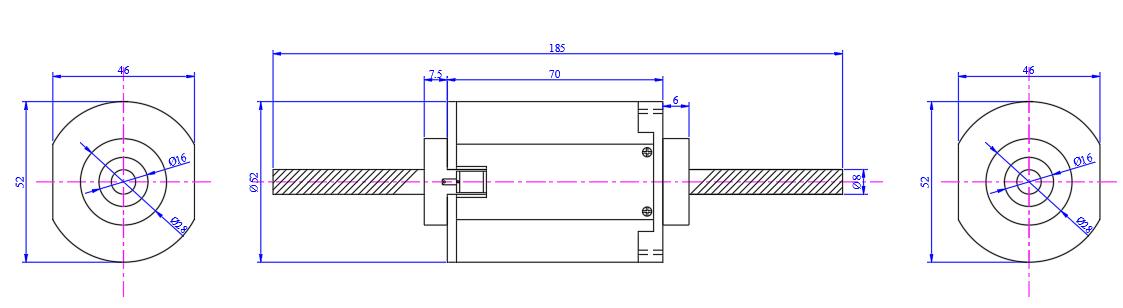
製品外観図
有効期限
製造日より、製品の安全使用期間は10年、連続使用時間は2000時間以上です。
製品の特徴
1.コンパクト、省スペース設計。
2.ボールベアリング構造;
3.ブラシの長寿命;
4. ブラシへの外部アクセスにより、簡単に交換でき、モーターの寿命をさらに延長できます。
5.高い始動トルク;
6.より速く停止するためのダイナミックブレーキ。
7.可逆回転;
8.シンプルな2線接続;
9.F種絶縁、高温溶接整流子。
10.高性能、高コストパフォーマンス、低干渉。
アプリケーション
スマートホーム、精密医療機器、自動車駆動装置、家電製品、マッサージおよびヘルスケア機器、パーソナルケアツール、インテリジェントロボット伝送、産業オートメーション、自動機械装置、デジタル製品などの分野で広く使用されています。
パフォーマンスイラスト



サーボシステム:入力対象(または与えられた値)の変化に追従して、物体の位置・姿勢・状態などの制御量を出力する自動制御システムです。サーボの主な役割は、制御コマンドの要件に従って電力を増幅、変換、調整することであり、これにより、駆動デバイスが出力するトルク、速度、位置を非常に柔軟かつ便利に制御できます。
その「サーボ」性能からサーボモーターと呼ばれています。その機能は、入力電圧制御信号をシャフト上の出力角変位および角速度に変換し、制御オブジェクトを駆動することです。
DCサーボモーターの原理
DCサーボモーターの動作原理は、基本的には通常のDCモーターと同じです。アーマチュアの空気流とエアギャップ磁束の作用により電磁トルクが発生し、サーボモータが回転します。通常、電機子制御方式は励磁電圧を一定にして電圧を変化させることで速度を変える方式が使われます。電圧が小さくなるほど速度が遅くなり、電圧がゼロになると回転が停止します。電圧がゼロになると電流もゼロになるため、モーターは電磁トルクを発生せず、自転現象も現れません。







